C モジュール構成図
Caコードについては図1-4で示し航法メッセージについては図1-5にまとめています 1 エフェメリスデータについて 位置演算に使用する衛星の正確な位置を示す軌道データで放送した衛星番号の衛星のみが使用する固有のデータです. スレーブ側はpic16c73で作成していますのでこちらはsspモジュールを 使用します ccs cコンパイラではスレーブ側にはsspモジュールがあることを前提にして いるようです sspモジュールを使うといっても関数上は区別が無く同じ形のプログラムと.
コンポーネント図の作成
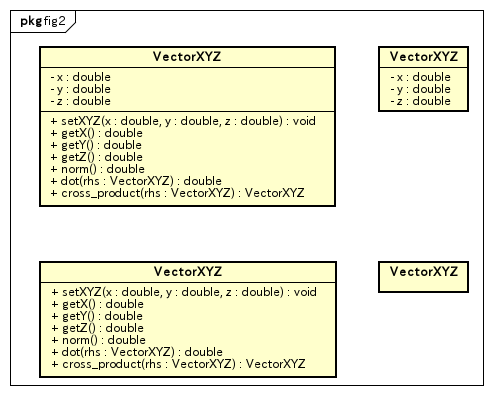
3 1 2 クラス図 Class Diagrams Simulation Programming Guidebook For C 1 0 Documentation
Umlモデルをどうやってc言語に落とし込むか Etロボコン2006へと続く道 3 2 3 ページ Monoist
2cpu構成時 最大容量 1cpu構成時 2cpu構成時 画面制御機能 グラフィック表示機能 2 ベイ数 最大容量 sas hdd ニアラインsas hdd bc-sata hdd sas ssd sata ssd pcie ssd スロット数 最大容量 pcie ssd m2 flash モジュール デュアルマイクロsd flash モジュール m2 flash モジュール.
C モジュール構成図. C C コードを Android プロジェクトに追加するにはプロジェクト モジュールの cpp ディレクトリにコードを配置します プロジェクトをビルドするとこのコードがネイティブ ライブラリにコンパイルされGradle によりアプリにパッケージ化できるようになります. 図2 OpenCV 30を構成する技術CVPR 2015チュートリアル資料から引用 またOpenCVでは Google Summer of Code GSOCの成果をベースにして機能の追加やチュートリアルの拡充が行われています. 以下の図はいずれもフェールオーバー状態のスイッチのデータ スタックを示します次の図ではリンク 2 の StackWise ケーブルが不良ですしたがってこのスタック構成では帯域幅を半分しか使用できず接続の冗長性も確保されません 図 6.
あるためモジュールを構成する個々の要素技術の内容からモジュールがlsi の機能とし てどう作用しているかまでを理解する必要がある 本章の構成 本章では主要なプロセスモジュール技術としてデバイスを電気的に孤立化させる素子. GPSを使えば地上のどこでも30秒以内で現在位置移動方向経路を知ることができ GPS Real Time Kinematics RTKはmm単位の高精度でそれらの. HP Z8 G4 Workstation システム構成図2020年6月25日版 変換アダプタ 4SH08AA USB Type-C to DisplayPort 変換アダプタ.
血液ガス電解質測定装置OMNI Cの概要 シスメックス株式会社学術部 外寸WDHcm 重量kg OMNI CAutoQCを除く 354410467 17装置のみ梱包材や試薬を含まない 表1OMNI Cの大きさ重さ 図1OMNI CAuto QCモジュール標準装備タイプ. Dtacシリーズの場合デジタルトランジスタを構成しているトランジスタは100maを流すことが出来ます これをi c 100maを定義しておりますこの構成トランジスタに抵抗r 1 r 2 をつけるとデジタルトランジスタになります. U-blox社高精度GNSSモジュールZED-F9P搭載のSparkFun GPS-RTK2 をベースにしたパワフルで最新のRTKReal Time KinematicsGPSボードのSMAコネクタ搭載版です.
8 クラスの継承


Mirs1504 ソフトウェア詳細設計書

ゴッホカメラの全体モジュール構成図 やすはるラボ 嫁 W

5分でわかる Uml クラス図 とは 書き方もご紹介 Lucidchart

10 3 モジュール分割は何度も練る
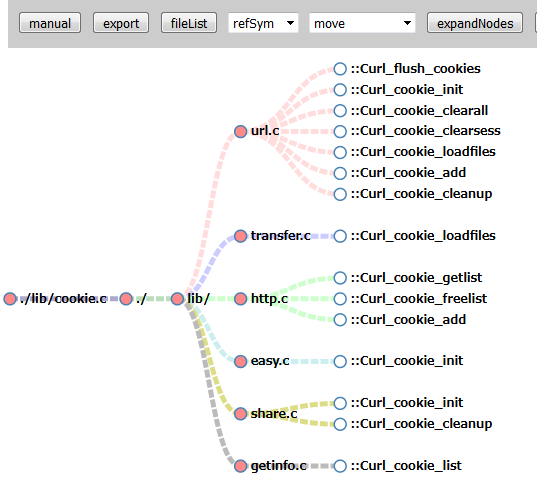
C言語 C コードを解析してインタラクティブなモジュール構成図っぽいグラフ表示 By Lctags 公開技術情報
新 C言語 ゲームプログラミングの館 Dxライブラリ
クラス図 Uml まとめ Excelでのサンプル図 底辺プログラマーの戯言

0 Response to "C モジュール構成図"
Post a Comment